ส่วนประกอบงานวิชา การเขียนโปรแกรมคอมฯ ครั้งที่ 2 ตัวอย่าง (Arduino พร้อมโค้ด)
ตัวอย่าง วงจร จากโปรแกรม Arduino พร้อมโค้ด
1.วงจรไฟกระพริบ LED 1 ดวง
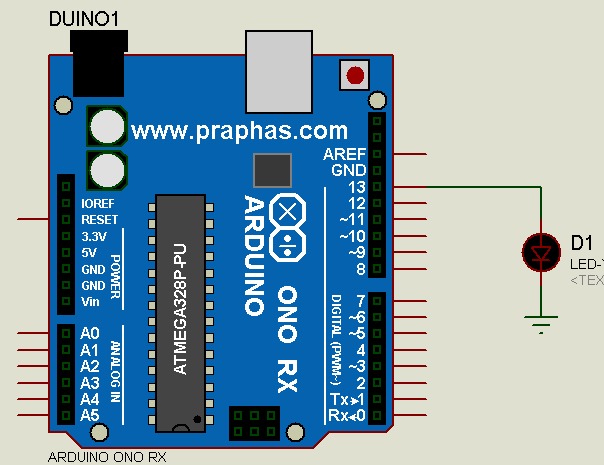
void setup()
{ pinMode(13, OUTPUT); //ตั้งค่าขา13เป็นOUTPUT
}
void loop() {
digitalWrite(13,HIGH); //เปิดไฟให้LEDสว่าง (HIGH)
delay(1000); //รอ1วินาที (1000millisecond=1second)
digitalWrite(13,LOW); //ปิดไฟให้LEDดับ
delay(1000); //รอ1วินาที
}
2. วงจรLEDแบบสั่งเปิดปิด

จากรูปมีการต่อSwichแบบLogicสูง
void setup()
{ pinMode(13, OUTPUT); //ตั้งค่าขา13เป็นOUTPUT
pinMode(2, INPUT); //ตั้งค่าขา2เป็นINPUT
}
void loop() {
if (digitalRead (2)==LOW) { //ถ้าขา2เป็นLOWทำตามวงเล็บต่อไปนี้
digitalWrite(13,HIGH); //เปิดไฟให้LEDสว่าง (HIGH)
}
else{ //ถ้าifไม่เป็นจริงทำตามวงเล็บนี้
digitalWrite(13,LOW); //ปิดไฟให้LEDดับ
}
} /*เมื่อเราตั้งขา2เป็นdigitalRead(2)==LOWนั่นหมายถึงขาสองจะทำตามเงื่อนไขถ้าได้รับLOW ซึ่งLOWได้จากค่า0จากSwichที่ทำเป็นLogicสูงจะทำให้ส่งค่า0เข้าขา INPUTได้เท่านั้นวงจรจึงจะทำงาน*/
{ pinMode(13, OUTPUT); //ตั้งค่าขา13เป็นOUTPUT
pinMode(2, INPUT); //ตั้งค่าขา2เป็นINPUT
}
void loop() {
if (digitalRead (2)==LOW) { //ถ้าขา2เป็นLOWทำตามวงเล็บต่อไปนี้
digitalWrite(13,HIGH); //เปิดไฟให้LEDสว่าง (HIGH)
}
else{ //ถ้าifไม่เป็นจริงทำตามวงเล็บนี้
digitalWrite(13,LOW); //ปิดไฟให้LEDดับ
}
} /*เมื่อเราตั้งขา2เป็นdigitalRead(2)==LOWนั่นหมายถึงขาสองจะทำตามเงื่อนไขถ้าได้รับLOW ซึ่งLOWได้จากค่า0จากSwichที่ทำเป็นLogicสูงจะทำให้ส่งค่า0เข้าขา INPUTได้เท่านั้นวงจรจึงจะทำงาน*/
3.วงจรพวกคุมMortor

void setup()
int A=9; //กำหนดให้ตัวแปรAเท่ากับขาD9
{ pinMode(A, OUTPUT); //ตั้งค่าขาAเป็นOUTPUT
}
void loop() {
digitalWrite(A,HIGH); //เปิดไฟให้Mortorทำงานโดยส่งสัญญาณไฟ(HIGH)
}
/*เมื่อส่งสัญญาณไฟให้Aนั้นหมายถึงส่งไฟให้ขาD9ซึ่งจะทำให้ไฟไปTickที่ขาเบสของ2N2222ทำให้ไฟ3.3V สามารถแล่นผ่านขาEไปขาC แล่นเข้าเมอเตอร์และลงไปที่กราวอันเป็นเสร็จสมบูรณ์*/
 /*เป็นตัวอุปกรณ์ที่จะทำให้เกิดเสียงโดยใช้คำสั่ง tone(pin,ความถี่มีหน่วยเป็นHz)
/*เป็นตัวอุปกรณ์ที่จะทำให้เกิดเสียงโดยใช้คำสั่ง tone(pin,ความถี่มีหน่วยเป็นHz)
และหยุดเสียงด้วยคำสั่ง notone(pin)*/
void setup()
int B=3; //กำหนดให้ตัวแปรB=ขา3
{ pinMode(B,OUTPUT); //Bเป็นOUTPUTดังนั้นขา3ก็เป็นOUTPUTเช่นกัน
}
int A=9; //กำหนดให้ตัวแปรAเท่ากับขาD9
{ pinMode(A, OUTPUT); //ตั้งค่าขาAเป็นOUTPUT
}
void loop() {
digitalWrite(A,HIGH); //เปิดไฟให้Mortorทำงานโดยส่งสัญญาณไฟ(HIGH)
}
/*เมื่อส่งสัญญาณไฟให้Aนั้นหมายถึงส่งไฟให้ขาD9ซึ่งจะทำให้ไฟไปTickที่ขาเบสของ2N2222ทำให้ไฟ3.3V สามารถแล่นผ่านขาEไปขาC แล่นเข้าเมอเตอร์และลงไปที่กราวอันเป็นเสร็จสมบูรณ์*/
4.Buzzer
และหยุดเสียงด้วยคำสั่ง notone(pin)*/
void setup()
int B=3; //กำหนดให้ตัวแปรB=ขา3
{ pinMode(B,OUTPUT); //Bเป็นOUTPUTดังนั้นขา3ก็เป็นOUTPUTเช่นกัน
}
void loop()
{
tone(B,1000); //ส่งความถี่1kHzของไปที่ขาB
noTone(B); //หยุดส่งความถี่ไปยังขาB
{
tone(B,1000); //ส่งความถี่1kHzของไปที่ขาB
noTone(B); //หยุดส่งความถี่ไปยังขาB
delay(1000); //รอ1วินาที
tone(B,1000); //ส่งความถี่1kHzของไปที่ขาB
noTone(B); //หยุดส่งความถี่ไปยังขาB
delay(1000); //รอ1วินาที
}
tone(B,1000); //ส่งความถี่1kHzของไปที่ขาB
noTone(B); //หยุดส่งความถี่ไปยังขาB
delay(1000); //รอ1วินาที
}



ความคิดเห็น
แสดงความคิดเห็น